1.6 Degrees of damping LO (i)
If no frictional forces act on an oscillator (e.g. mass-spring system,
simple pendulum system, etc.), then it will oscillate indefinitely.
, then it will oscillate indefinitely.")
In practice, the amplitude of the oscillations decreases to zero as a
result of friction. This type of motion is called damped harmonic motion.
Often the friction arises from air resistance (external damping) or
internal forces (internal damping).
1.6.1 if the motion is x= x0 sin(ωt), the following are the x
vs t graphs for 2 periods, as an illustration of the damping.

1.6.1.1
No damping
when
b=0.0 no damping, system oscillates forever without coming to rest.
Amplitude and thus total energy is constant

1.6.1.2
Light damping
when
b=0.1 very lightly damp, system undergoes several oscillations of
decreasing amplitude before coming to rest. Amplitude of oscillation decays
exponentially with time.

1.6.1.3
Critical damping
when
b=2.0, critically damp system returns to equilibrium in the
minimum time, without overshooting or oscillating about the equilibrium
position amplitude.

1.6.1.4
Heavy damping
when
b=5.0, very heavy damp, system returns to equilibrium very slowly
without any oscillation
1.6.2 a more typical starting position, is x= x0 cos(ωt),
the following are the x vs t graphs for 2 periods, as an illustration of
the damping.
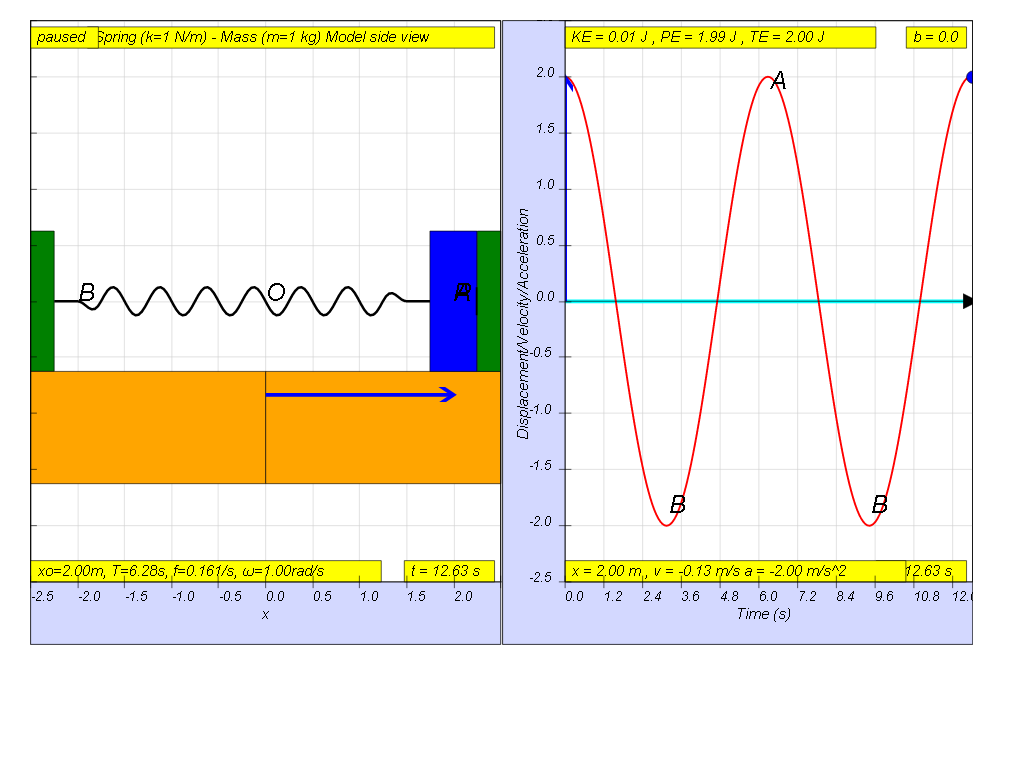
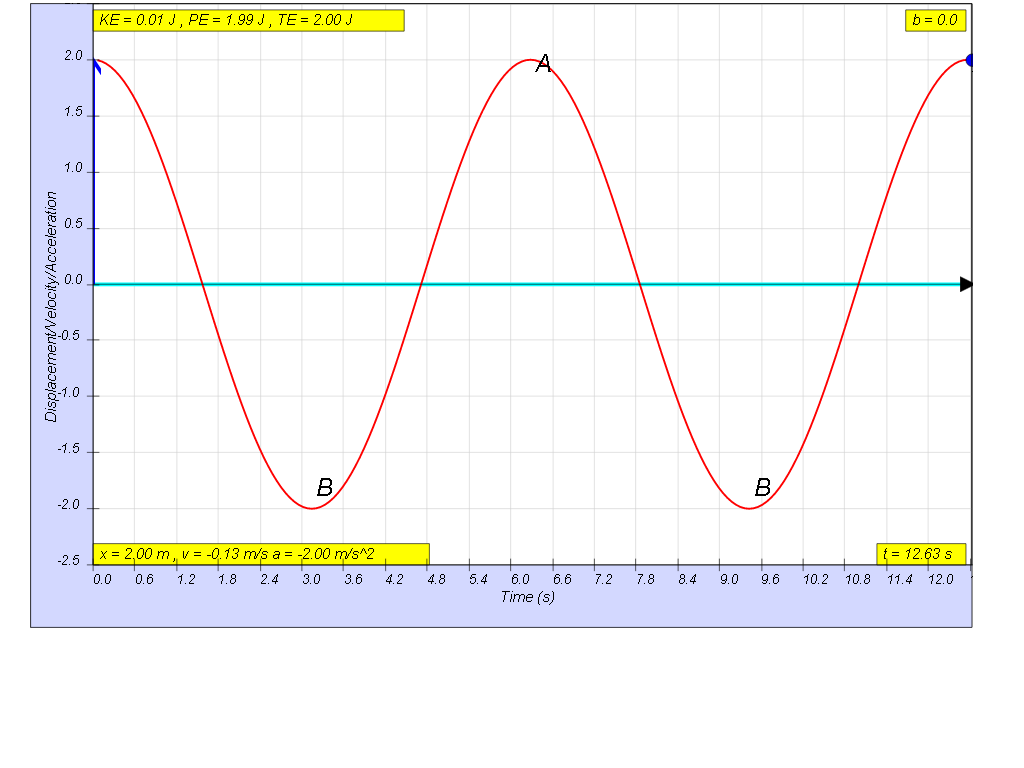
1.6.2.1 No damping
when
b=0.0 no damping, system oscillates forever without coming to rest.
Amplitude and thus total energy is constant
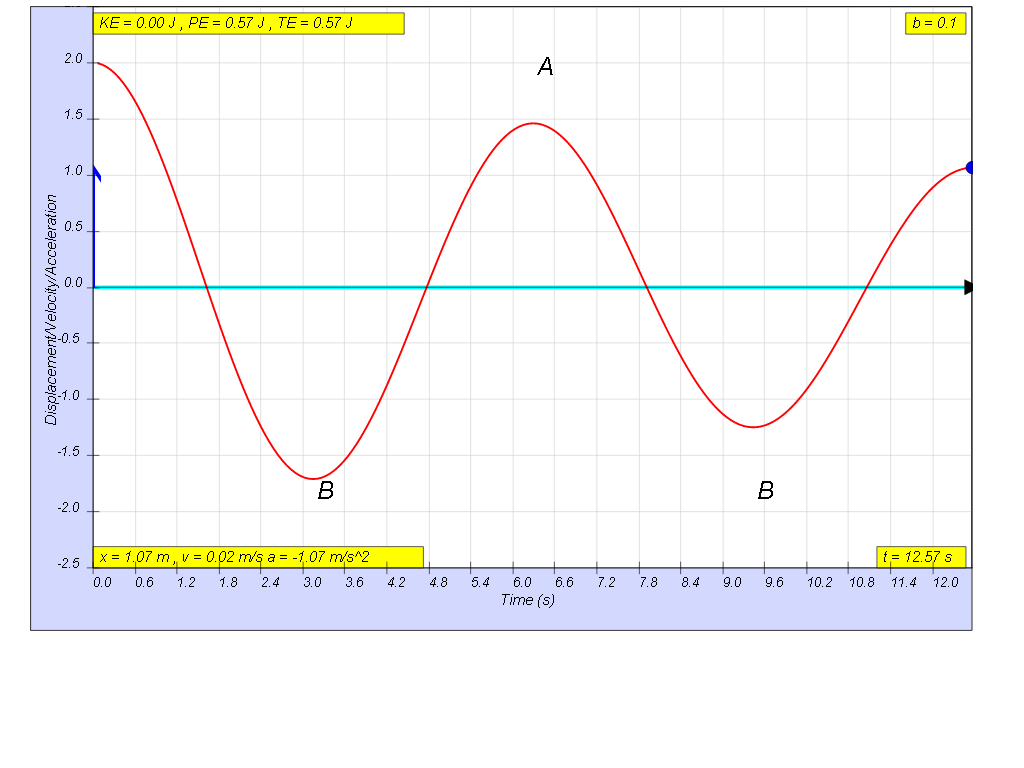
1.6.2.2 Light damping
when b=0.1 very light damping, system undergoes several oscillations of
decreasing amplitude before coming to rest. Amplitude of oscillation decays
exponentially with time.
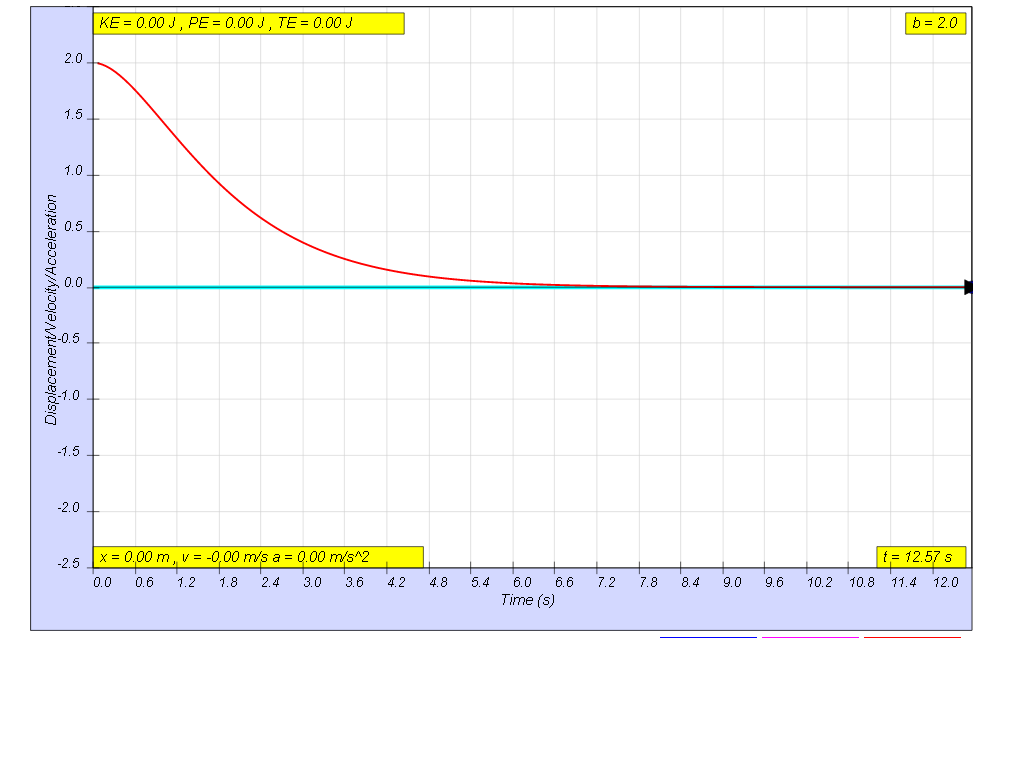
1.6.2.3 Critical damping
when
b=2.0 critically damp, system returns to equilibrium in the minimum
time, without overshooting or oscillating about the equilibrium position
amplitude.
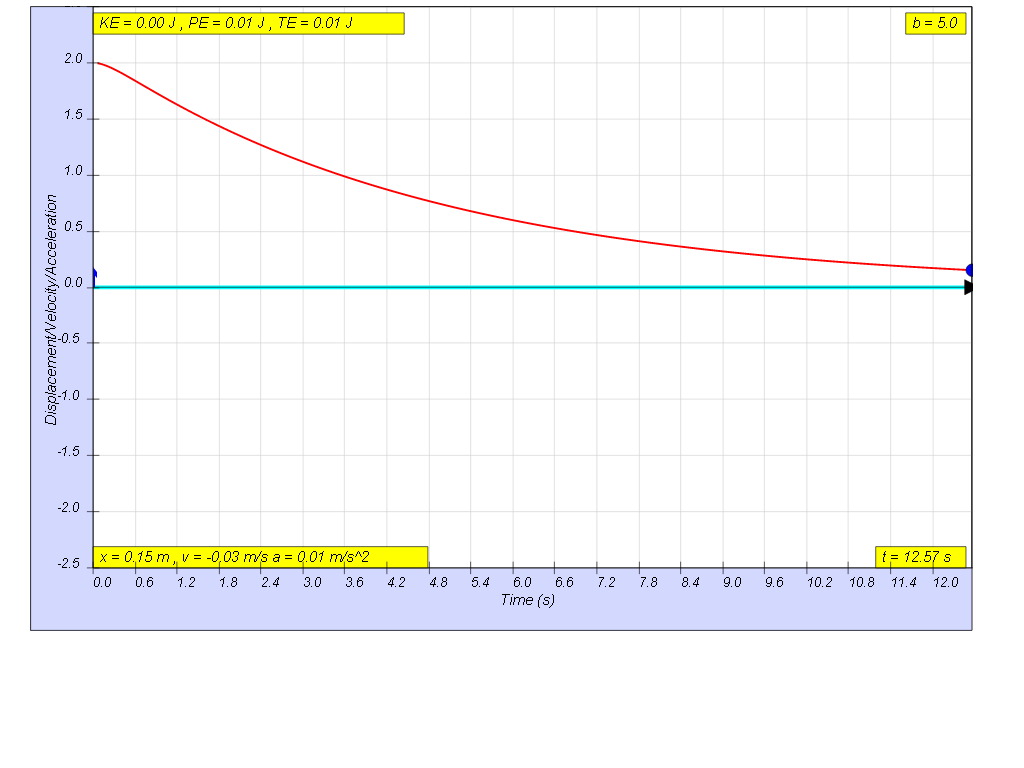
1.6.2.4 Heavy damping
when
b=5.0 very heavy damp, system returns to equilibrium very slowly
without any oscillation.
1.6.3 Model:
- Run
Sim
- http://iwant2study.org/ospsg/index.php/84